
Parallel Gripper for EEZYbotARM MK2
Author: SThone
This is a reposted article found in Thinkiverse: Parallel Gripper for EEZYbotARM MK2 by sthone - Thingiverse
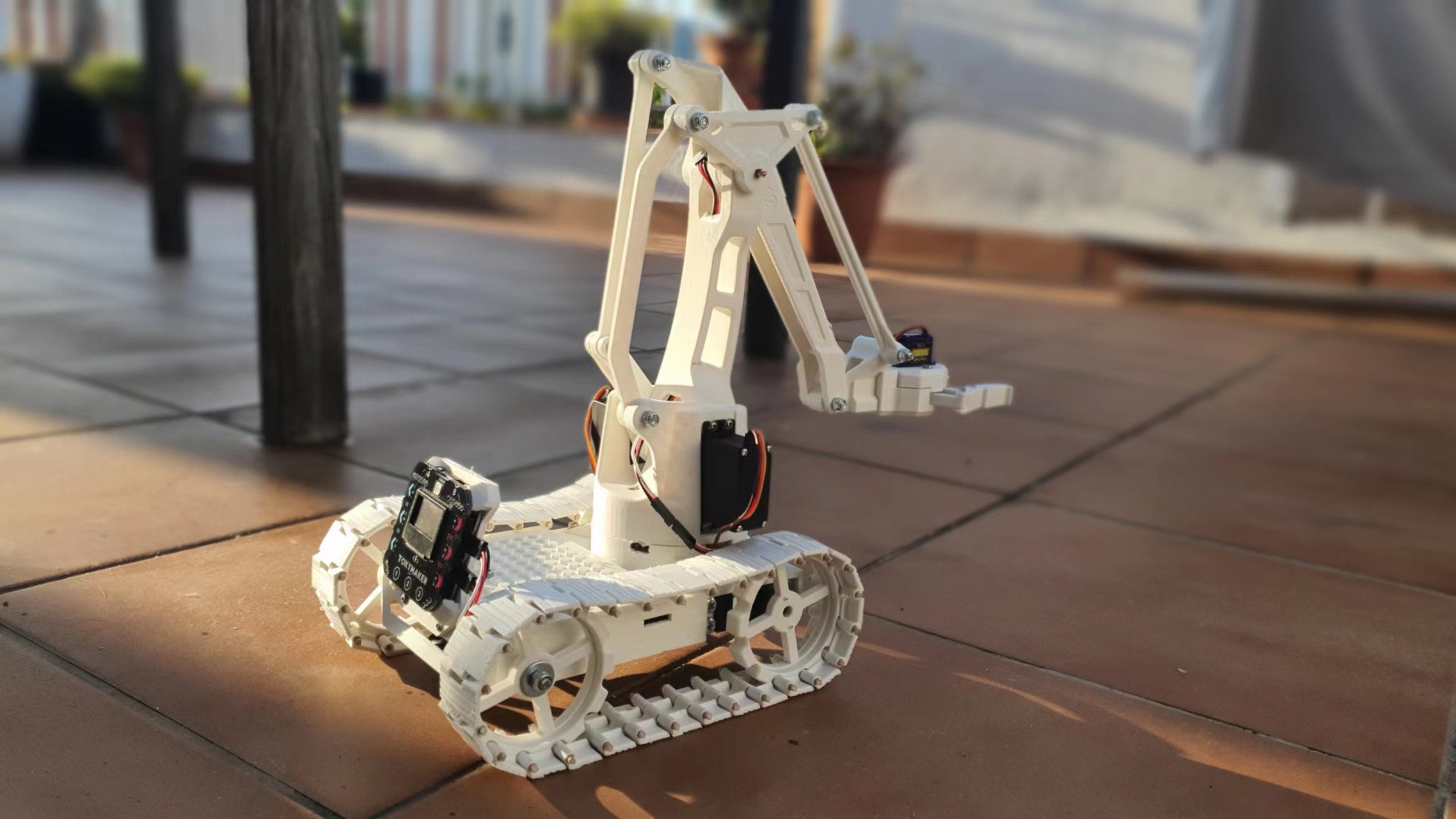
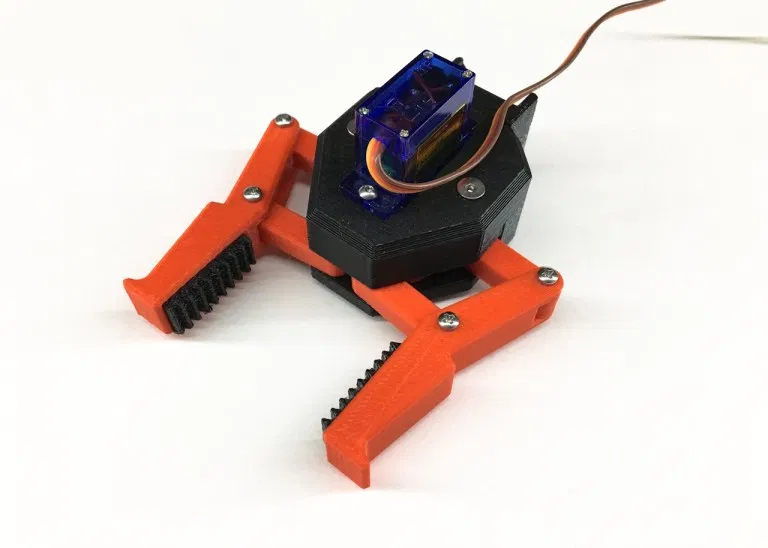
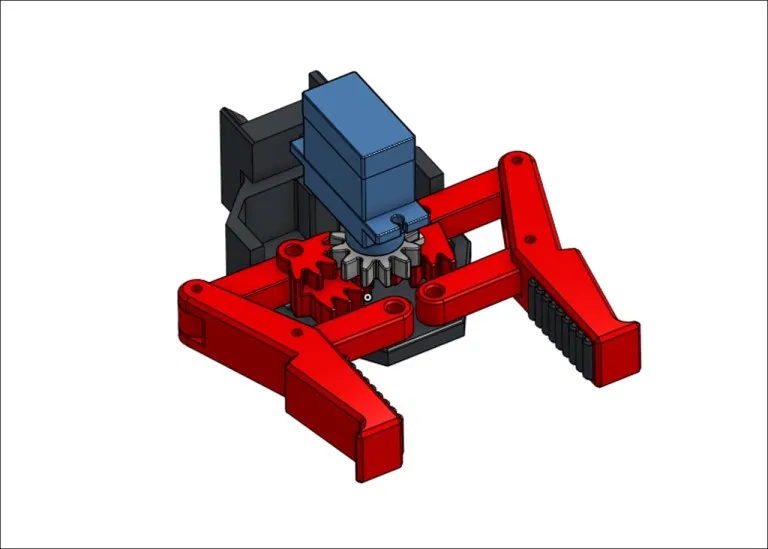
It is based on a remix of his Rov Manipulator (Parallel Gripper) modified to fit the EEZYbotARM MK2 robotic arm and be controlled by a servo instead of a rotating shaft.
Use a SG90 Servo
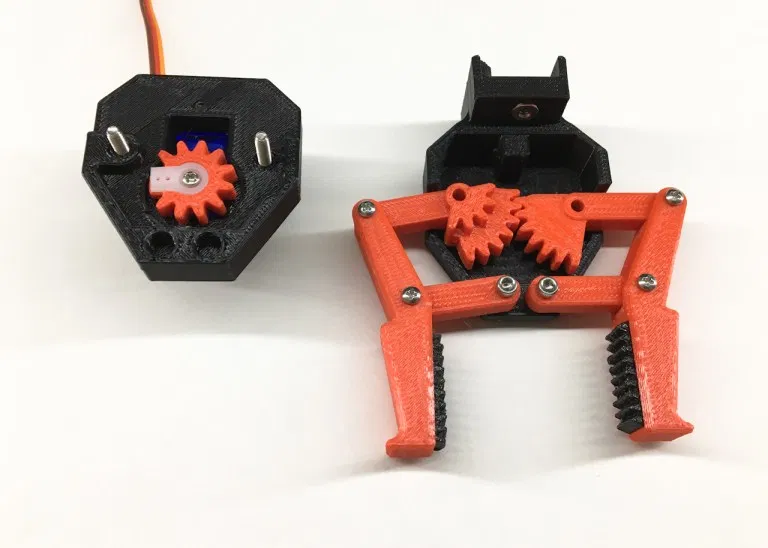
Hardware required (See pictures for screw layout.)
(4) 2-56 x 1/2" screws
(2) 4-40" x 3/8" Button Head Screws
(2) 4-40 x 1" Flat Head Screws
Servo Mounting screws.
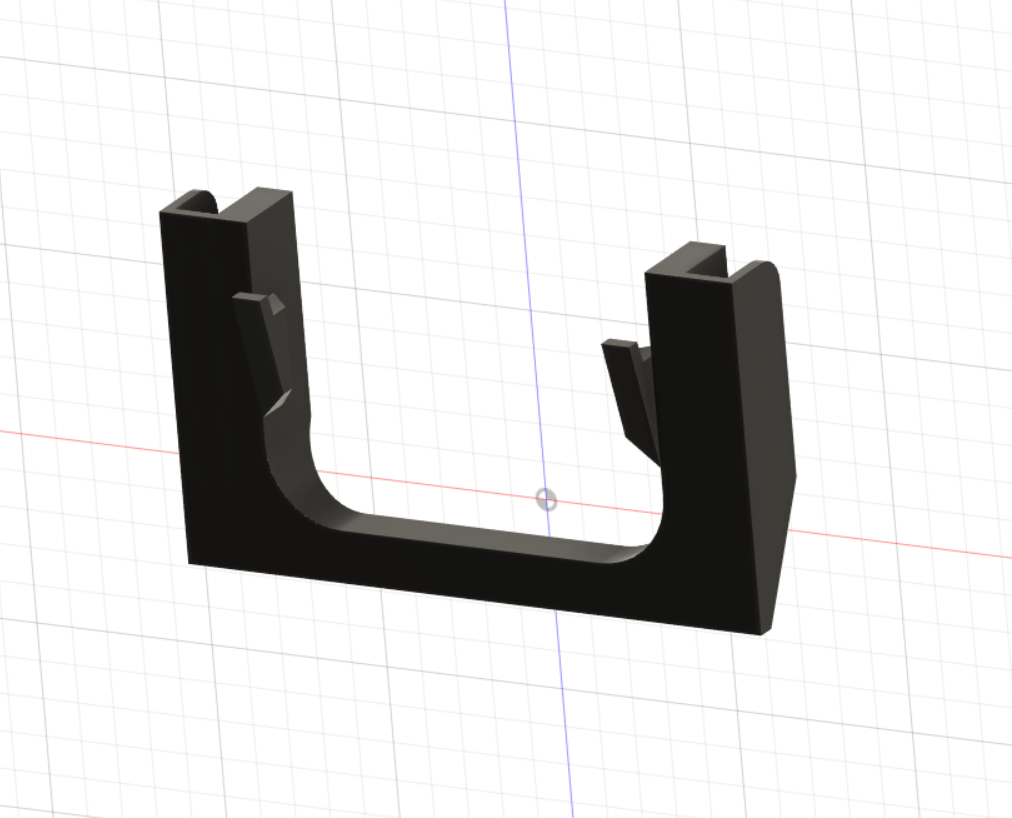
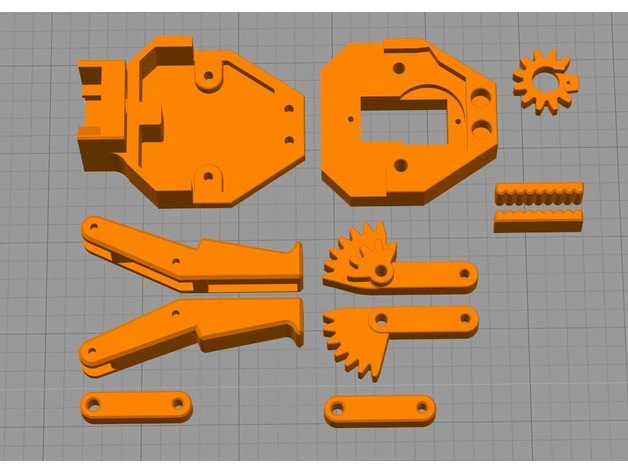
Some of the parts will need to be oriented to be printed properly. See pictures for the layout I used. The fingers, forward hinges, and Pad need to be printed x 2. The finger pads were printed in a flexible filament for better grip but can be cut from rubber.
See https://www.theneverendingprojectslist.com/raspberrypiprojects/raspberrypiroboticarm/ for more info.